I 'll take this question and answer with respect to Yokogawa DCS.
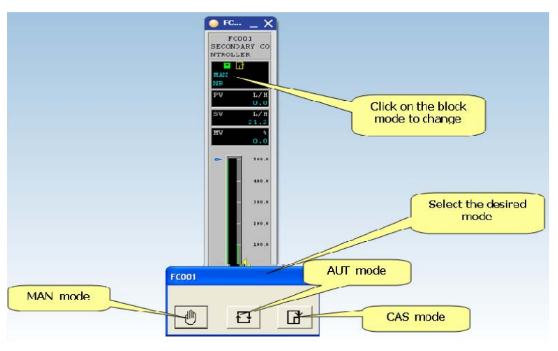
Basically DCS has 4 modes
-
MAN (manual mode)
-
AUT (auto mode)
-
CAS (cascade mode)
- So In MAN mode MV(manipulated variable) can be changed by incrementing or decrementing corresponding keys.
- In AUT mode MV value can’t be changed. On the faceplate of the PID controller the process value (PV) from the field is displayed. The set
value (SV) needs to be manually entered by the operator. During normal operations, the PID controller is in the AUT mode.
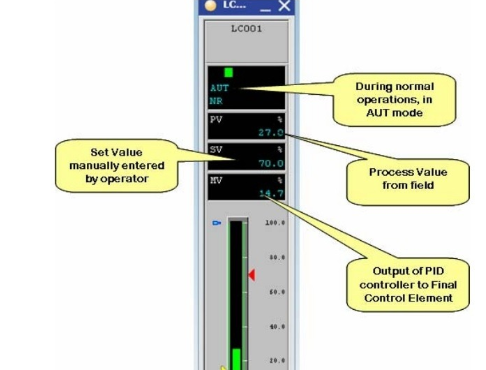
In the Auto mode the system automatically calculates the manipulated value (MV). This is the output going to the Final Control Element.
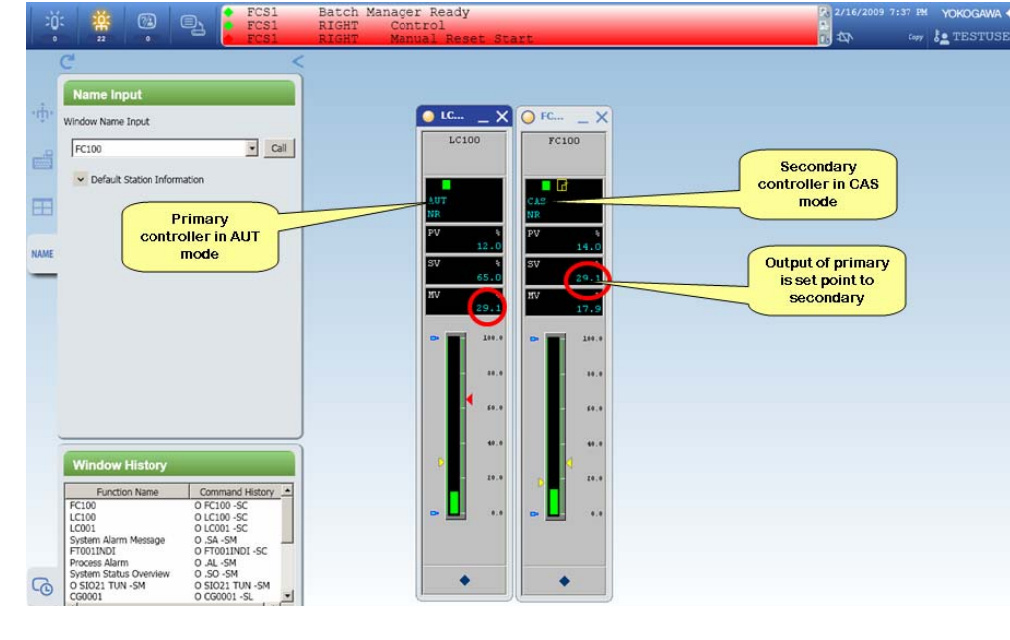
- Whereas in CAS mode/loop the output of primary controller(say MV1) goes as setpoint of the secondary controller (SV2). The output of secondary controller goes to final control element. Also for a cascade loop, the primary controller can be in AUT or MAN mode , but the secondary controller has to be in CAS mode .
- PRD (Primary Direct Mode)
This is considered as special case/mode. In PRD mode the output of primary controller(MV1) directly goes to primary control element. The secondary controller is bypassed and can’t be operated. The PRD mode can be set from
the tuning window of the secondary controller.
The following picture gives general idea of all modes.
credits: Premsai Reddy