Offset: An important characteristic of the proportional control mode is that it produces a permanent residual error in the operating point of the controlled variable when a load change occurs and is referred to as offset.
It can be minimized by larger constant Kp which also reduces the proportional band.
Figure shows the occurrence of offset in proportional control mode.
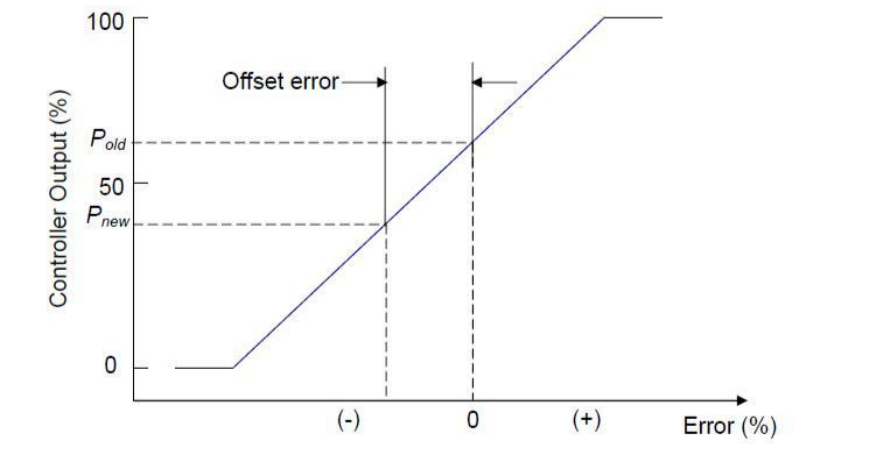
Fig. Occurrence of offset error in proportional controller for a load change.
Consider a system under nominal load with the controller output at 50% and error zero as shown in Fig. If a transient error occurs, the system responds by changing controller output in correspondence with the transient to effect a return-to-zero error.
Suppose, however, a load change occurs that requires a permanent change in controller output to produce the zero error state.
Because a one-to-one correspondence exists between controller output and error, it is clear that a new zero-error controller output can never be achieved. Instead, the system produces a small permanent offset in reaching compromise position of controller output under new loads.
Applications:
-
Whenever there is one-to-one correspondence of controller output is required with respect to error change proportional mode will be ideal choice.
-
The offset error limits the use of proportional mode, but it can be used effectively wherever it is possible to eliminate the offset by resetting the operating point.
-
Proportional control is generally used in processes where large load changes are unlikely or with moderate to small process lag times.
-
If the process lag time is small, the PB can be made very small with large Kp, which reduces offset error.
-
If Kp is made very large, the PB becomes very small, and proportional controller is going to work as an ON/OFF mode, i.e. high gain in proportional mode causes oscillations of the error