PID Control Loop Tuning Software With Advanced Process Control (APC) and Model-based Control (MPC) Functions.
PID Control Loop Tuning Software
This software is a comprehensive primary and advanced process control (APC) simulator and optimizer. With this, you can build simulations to mimic any process in just a few minutes.
This is modern and unique Primary PID Tuning and Advanced Process Control design and optimization software which works entirely in the closed-loop mode without any step-test in the time domain. Unlike competitor PID controller software, this works from fast millisecond scan times to seconds, minutes, and multiples of minutes. This allows simulation from super-fast compressor-surge control loops to very slow distillation column online analyzer-based purity control loops.
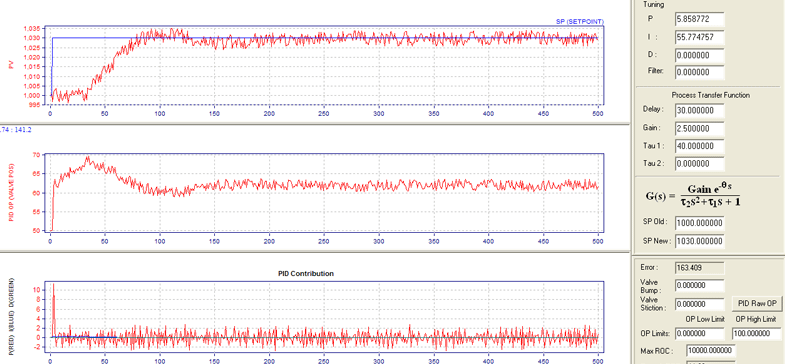
Figure 1 shows the PID main simulation screen. Many important process control parameters can be accessed from a single screen. This software PID has a very convenient and easy user interface.
An overview list of Pitops-PID features are shown below:
PID Software Functions
- Single/Slave PID simulation and tuning optimization
- Cascade/multiple cascade simulation and tuning optimization
- Override constraint control schemes
- Random (white) noise, to precisely match the actual noise level seen on DCS
- Slow process drift representative of slow and medium-fast disturbances actually seen in DCS
- Internal model control (IMC) simulation
- Dead time compensated (DTC) controller implementation and optimization
- Feedforward simulation and optimization
- Model-based control using regressed and/or rigorous model
- Production rate maximizer design and parameter optimization
- Millisecond surge control tuning and optimization
- Integrating transfer function tuning and optimization
- First order, second order with dead time simulations
- Open-loop unstable process dynamics simulation and characterization
- Simulation and optimization of nonlinear processes
- Control valve characterization
- Optimizing PID parameters to deal with Control valve stiction or deadband
- Gap action control simulation
Link